Un cuerpo
rígido es aquel que tiene dimensiones mensurables y está formado por numerosas
partículas, las cuales siempre guardan entre sí las mismas distancias. Por lo
tanto, un cuerpo rígido no se deforma, porque de lo contrario las partículas
que lo componen cambiarían su separación.
Este modelo
es más cercano a la realidad que el modelo de partícula, ya que este último no
considera la extensión de los objetos, al suponer que carecen de dimensiones.
Sin embargo, no deja de ser una idealización, puesto que en la realidad, los
objetos reales sí se deforman bajo la acción de fuerzas, pero si las
deformaciones son pequeñas, el modelo funciona bastante bien en la práctica.
 |
| El semáforo de esta concurrida avenida neoyorquina está en equilibrio estático, a menos que sople un fuerte viento. Fuente: Pixabay. |
Sobre los
cuerpos rígidos actúan fuerzas, capaces de hacer que se trasladen, al igual que
ocurría con las partículas. Y también actúan torques o momentos, cuyo efecto,
como se sabe, es el de producir rotaciones.
Un cuerpo
rígido en equilibrio es aquel que no experimenta aceleración lineal ni
aceleración angular, razón por la cual hay dos condiciones de equilibrio en
este caso.
Nótese que
el cuerpo no necesariamente está inmóvil si se encuentra en equilibrio, porque
al igual que sucede con el modelo de partícula, el centro de masas del objeto
puede moverse con movimiento rectilíneo uniforme, o la velocidad angular puede
mantenerse constante. En este caso se habla de equilibrio dinámico,
mientras que si el objeto está en reposo (nada de trasladarse ni rotar),
entonces se trata de equilibrio estático. Esto último será normalmente el
objetivo, sobre todo si se trata de construcciones y edificaciones:
vcm = 0; ω = 0
Donde vcm
y ω denotan respectivamente la velocidad del centro de
masas (traslación) y la velocidad angular (rotación). Estas cantidades son
vectoriales, por ello se las representa con negrita en texto impreso.
Condiciones de
equilibrio del cuerpo rígido
Para que un
cuerpo rígido esté en equilibrio hacen falta dos condiciones. La primera es que
la fuerza neta sobre el objeto de cero, esto es suficiente para garantizar el
equilibrio de la partícula, como se vio en un post anterior, pero no para un
cuerpo cuyo tamaño sea mensurable (las partículas por definición solo se pueden
trasladar).
Entonces,
la segunda condición debe garantizar que el objeto no gire o se vuelque, y allí
entra en escena el torque o momento de la fuerza, que como ya se sabe, es
aquella magnitud física capaz de causar rotaciones en los cuerpos.
Primera condición
El cuerpo no se traslada, por lo tanto, de acuerdo a la segunda ley de Newton, la resultante de las fuerzas que actúan sobre el objeto debe ser nula, y en consecuencia, su aceleración lineal también:
1) ∑ Fi = 0
Las fuerzas
que actúan sobre el objeto son las ejercidas por otros cuerpos, como el peso, por
ejemplo, que es ejercido por la Tierra, las normales, los rozamientos, las
tensiones y las reacciones a los apoyos en general.
La ecuación
1) es una ecuación vectorial, de la cual surgen tres ecuaciones escalares, una
para cada componente de la fuerza:
∑ Fx = 0; ∑ Fy = 0; ∑ Fz = 0
Segunda condición
Esta
condición impone que el cuerpo tenga aceleración angular nula, por lo tanto, la
sumatoria de los torques o momentos respecto a cualquier eje arbitrario
O es nula:
2) ∑ Mi = 0
Siendo una
ecuación vectorial, se tienen tres ecuaciones escalares más, para un total de
seis:
∑ Mx = 0; ∑ My = 0; ∑ Mz = 0
Un problema
de estática en tres dimensiones está completamente determinado cuando no
tiene más de 6 incógnitas y todas se pueden calcular, ya que este es el número
máximo de ecuaciones del que se dispone, aunque no todos los problemas tienen
solución, aún si se tiene igual o menor número de incógnitas que de ecuaciones,
esto dependerá de la configuración.
Para
problemas en dos dimensiones, el planteamiento se reduce a 3 ecuaciones,
2 ecuaciones para la fuerza y una para el torque o momento, es decir:
∑ Fx = 0; ∑ Fy = 0; ∑ Mz = 0
Estas incógnitas pueden ser diversas: fuerzas, momentos, puntos de aplicación o incluso ángulos. Hay problemas y ejercicios para todos los gustos.
Centro de masas y
centro de gravedad
El centro de masas de un cuerpo es el punto donde se puede suponer que esté concentrada su masa, mientras que el centro de gravedad es el punto de aplicación del peso. Recuérdese que en un cuerpo rígido, compuesto de muchas partículas, cada una de ellas está sujeta, cómo no, a la acción de la gravedad y el peso del cuerpo es la resultante de todas estas pequeñas contribuciones.
A efectos
prácticos, suponiendo que la aceleración de la gravedad es la misma para cada
punto del cuerpo, el centro de masas y el centro de gravedad coinciden, por lo
tanto, en un cuerpo rígido, es allí donde se aplica el peso.
Para
objetos sólidos homogéneos y de geometría regular, como barras, discos y
esferas, por ejemplo, el centro de gravedad y el centro de masas coincide con
el centro geométrico. Con esto en mente será suficiente por ahora para
resolver algunos problemas de equilibrio en dos dimensiones.
Pasos para aplicar las condiciones de equilibrio
Para resolver problemas de equilibrio de cuerpo rígido, hay que seguir algunos pasos para plantear correctamente las dos condiciones anteriormente descritas:
-Aislar al cuerpo rígido en cuestión.
-Dibujar su diagrama de cuerpo libre, con cada fuerza en el punto de aplicación que efectivamente le corresponde. El peso se dibuja aplicado en el centro de gravedad, que corresponde al centro geométrico del objeto regular y homogéneo, a menos que en el enunciado se indique otra cosa. Por su parte el roce, si lo hay, se dibuja en el punto de apoyo.
-Elegir un sistema de coordenadas adecuado para descomponer las fuerzas, tal como se hace para el equilibrio de la partícula.
-Escoger un eje de rotación O para calcular los momentos. Esta elección es arbitraria, pero conviene escoger un eje en el cual se anulen los torques o momentos de las fuerzas desconocidas.
Ejemplo 1
Calcular FA
y FB para la viga mostrada en la figura. Las fuerzas dirigidas
hacia abajo representan los pesos de las maquinarias sobre la viga, mientras
que las que se dirigen hacia arriba son las reacciones en los soportes. Supóngase
que la viga es uniforme y tiene una masa de 280 kg.
 |
| Fuente: Giancoli, Douglas. Física con Aplicaciones. |
Solución

Ahora se
aplica la primera condición de equilibrio, para lo cual se escoge un sistema de
coordenadas apropiado. Como en este ejemplo todas las fuerzas son verticales,
basta con el eje y, cuyo sentido + es hacia arriba y cuyo sentido – es hacia abajo.
En tal
caso:
∑ Fy = 0
∑ Fy = FA –
4300 N – W – 3100 N – 2200 N + FB = 0
La magnitud del peso se calcula, como siempre, multiplicando
la masa por el valor de g:
W = mg = 280 kg × 9.8 m/s2 = 2744 N
Por lo tanto:
FA – 4300 N – 2744 N – 3100 N –
2200 N + FB = 0
FA + FB = 12344 N
Se tiene una primera ecuación que contiene dos incógnitas.
Enseguida se aplica la segunda condición de equilibrio:
∑ Mz = 0
Ya que el
eje de rotación es perpendicular al plano de la pantalla, podría llamarse eje z,
y conviene ubicarlo en el punto de aplicación de la fuerza FA o bien FB. Cualquiera sea la selección, las
fuerzas son perpendiculares a la posición, así que el momento de cada una se
calcula multiplicando simplemente la magnitud de la fuerza por la distancia y
tiene la dirección de dicho eje.
Las
magnitudes de las fuerzas se tienen, así como las distancias. Todo está en la
figura. Seleccionando el eje de rotación que pasa por el punto A (ver la figura
arriba) y es perpendicular a la pantalla, se tienen los momentos:
MA
= FA ∙dA = 0
M1
= − F1∙d1 =
− 4300 N ∙ 2 m = − 8600 N∙m
Este
momento lleva signo negativo, porque tiende a hacer rotar a la viga en sentido horario,
el cual se escoge negativo por convención. Las demás fuerzas, exceptuando FB,
tienen ese efecto.
MW
= − FW∙dW =
− 2744 N ∙ 5 m = −13720 N∙m
M2
= − F2∙d2 =
− 3100 N ∙ 6 m = − 18600 N∙m
M3
= − F3∙d3 =
− 2200 N ∙ 9 m = − 19800 N∙m
MB
= FB∙dB = FB ∙ 10 m = 10FB
Dado que
todos los momentos están dirigidos a lo largo del eje z, se realiza la suma
algebraica:
∑ Mz = − 8600 N∙m − 13720 N∙m – 18600 N∙m − 19800 N∙m + 10FB =
0
Que conduce
a:
10FB = 60720 N∙m
FB
= 6072 N
Sustituyendo
este resultado en
FA + FB
= 12344 N
Se obtiene:
FA = 12344 N − 6072 N
FA = 6272 N
Ejemplo 2
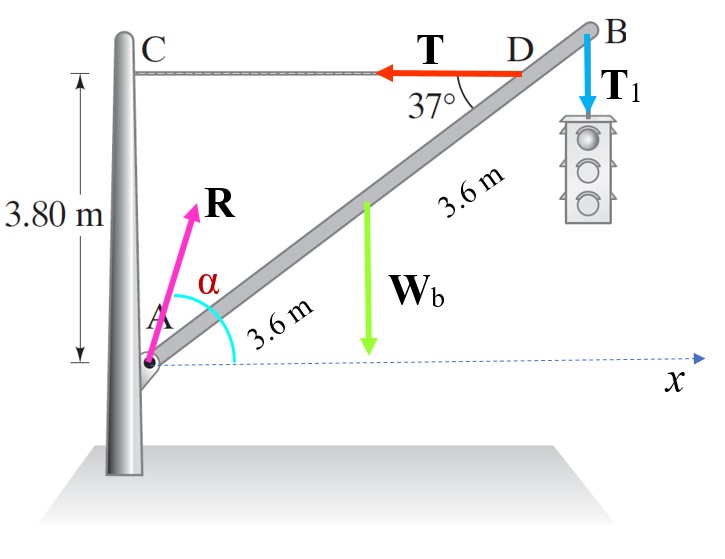
Un semáforo
cuelga de la estructura mostrada en la siguiente figura. La barra AB, hecha de
aluminio, es uniforme, mide 7.20 m de longitud y su masa es de 12 kg. La masa
del semáforo es de 21.5 kg, mientras que el cable CD es muy liviano (suponga
despreciable su masa). Hallar:
a) La tensión T en el cable
b) La reacción R en A
 | |
|
Solución
En primer lugar, se dibujan los diagramas de cuerpo libre del semáforo y de la barra:

Semáforo
Sobre el
semáforo actúan la tensión T1 en la cuerda y su peso Ws,
ambas fuerzas son verticales (están en el eje y). La primera condición de
equilibrio asegura que:
∑ Fy = 0
T1 − Ws = 0
T1 = Ws = ms ∙ g = 21.5 kg ∙ 9.8 m/s2 = 210.7 N
Barra
Sobre la barra actúa un conjunto de fuerzas que están en el
plano xy del papel: Wb es el peso de la barra, que se aplica justo en
el centro de la misma, por ser la barra un objeto geométrico uniforme, luego
está la tensión T1 vertical, aplicada en el extremo B, cuya
magnitud ya se calculó en el paso anterior. Enseguida está la tensión T
horizontal en la cuerda que que conecta el extremo B con el punto C del poste,
y por último la reacción R en el punto A. Esta última es desconocida, así que se le proporciona una dirección arbitraria al principio, luego los signos resultantes de los cálculos nos dirán si la suposición es correcta.
El peso de
la barra se calcula fácilmente:
Wb = mb ∙ g = 12 kg ∙ 9.8 m/s2 = 117.6 N
La fuerza R es desconocida y forma un ángulo α
con la horizontal, tiene por lo tanto, componentes a lo largo de los ejes x
e y. Este ángulo es desconocido (no es 37º).
La primera condición de equilibrio aplicada a la barra
señala que:
∑ Fx = 0
∑ Fx = R cos α – T = 0
∑ Fy = 0
∑ Fy = R sen α − Wb – T1 = 0
De esta ecuación se puede despejar la componentes vertical
de la reacción, es decir, Ry:
Ry
= R sen α = Wb + T1 = 117.6 N + 210.7 N = 328.3 N
Ahora pasamos a aplicar la segunda condición de equilibrio, todos
los momentos estarán dirigidos a lo largo del eje z, que es la dirección
saliente o entrante a la pantalla:
∑ Mz = 0
Enseguida
se debe seleccionar el punto que contiene al eje de giro, este punto es, como
ya se ha explicado, arbitrario, pues al estar en equilibrio estático la barra,
no gira alrededor de ningún punto y por lo tanto se puede elegir cualquiera.
Pero los puntos A y B son especialmente convenientes, puesto que ahí se aplican
dos fuerzas desconocidas, que son R y T.
Por otra parte, se elige como sentido positivo
la dirección antihoraria, mientras que el giro en sentido horario se considera
negativo.

Eligiendo
el punto A para el cálculo de los torques o momentos, se tiene:
∑ Mz = MR − MW + MT − MT1 = 0
La explicación de los signos asignados se encuentra en cada
ítem, veamos:
Momento de la reacción
MR = 0 (ya que R está aplicada en el eje
de giro)
Momento del peso de la barra
MW
= Wb rb sen 53º = 117.6 N ∙ 3.6 m ∙ sen 53º = 338.1 N ∙m
Este momento tiende a producir un giro en sentido horario, para
verlo basta con imaginar que se rompe el soporte en A.

Momento de la tensión T1
MW
= T1 rT1 sen 53º = 210.7 N ∙ 7.2 m ∙ sen 53º = 1211.6 N ∙m
Este momento también tiende a producir un giro horario,
imaginar lo que pasaría si el semáforo fuera muy pesado.

Momento de la tensión T
MT
= T∙ rT ∙ sen 37º
Se sabe que esta tensión tiende a producir un giro en
sentido antihorario, que contrarresta la tendencia de de giro horario causado
por los demás momentos. La magnitud rT se puede calcular a través de
trigonometría:
sen 37 º =
3.8 m / rT → rT = 3.8 m / sen 37º
= 6.31 m

Retomando la segunda condición de equilibrio:
MR
− MW + MT − MT1 = 0
Sustituyendo lo que se tiene hasta ahora:
0 – 1211.6 N
∙m – 338.1 N ∙m + MT = 0
MT
= 1211.6 + 338.1 N ∙m = 1549.7 N ∙m
Por lo tanto:
MT
= T∙ rT ∙ sen 37º = 1549.7 N ∙m

Y de esta ecuación, se determina la
componente en x de la reacción:
∑ Fx = R cos α – T = 0
R cos α = 407.8 N = Rx
Finalmente, el vector R
tiene la forma:
R = Rx i + Ry j = 407.8 i + 328.3
j N
Ejemplo 3

Solución
Créditos
Texto e imágenes por: F. Zapata
Video por: R. Pérez
No hay comentarios:
Publicar un comentario